|
Nikita Sarawgi I'm a robotics engineer at GrayMatter Robotics, working on closed-loop active perception and decision-making for robots on industrial shopfloors. I completed my M.S. in Computer Science at USC Viterbi in December 2025, advised by Satyandra K. Gupta and Daniel Seita. My research is motivated by a simple problem: robots deployed in the real world routinely encounter conditions outside their training distribution. My goal is to build systems that adapt to this uncertainty rather than fail silently, by composing learned behaviors and representations to generalize across novel environments and task variations. My work spans perception, manipulation, and sequential decision-making in real-world settings. I am interested in how robots can use perception to actively reduce uncertainty before acting, and how decision-making systems can select and sequence behaviors to complete tasks even as conditions shift at test time. |

|
Updates |
| May 2026 | I'll be attending ICRA 2026 in Vienna this June. Please reach out if you are around and would like to connect! |
| February 2026 | I joined GrayMatter Robotics full-time as a robotics engineer. |
| January 2026 | Our paper, STEP, was accepted to ICRA 2026. Hope to see you in Vienna! |
| December 2025 | I completed my M.S. in Computer Science from USC Viterbi. |
| October 2025 | I joined GrayMatter Robotics as a robotics intern, working on translating learning-based manipulation research into deployable perception and control systems for high-mix manufacturing. |
PublicationsResearch at the intersection of robot learning, active perception, and reasoning under uncertainty. Selected work below. |
|
Preference-Conditioned Reinforcement Learning for Space-Time Efficient Online 3D Bin Packing
Nikita Sarawgi, Omey M. Manyar, Fan Wang, Thinh H. Nguyen, Daniel Seita, Satyandra K. Gupta ICRA, 2026 project page / arXiv / code An RL policy for online 3D bin packing that chooses both the next item to pack and the face to grasp it on. A preference parameter set at inference time trades off packing density against operation time without retraining. |
|
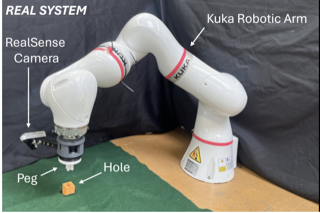
Autonomous Execution of Insertion Operations in Space Assembly Tasks
Abhay Negi, Nikita Sarawgi, Dhanush Penmetsa, Hantao Ye, Omey Manyar, Ashtin Cheng, Satyandra K. Gupta AIAA SciTech Forum (ISAM IV), 2025 paper An autonomous insertion system for in-space assembly. The robot first estimates a coarse pose to position a wrist-mounted camera near the target, then uses a learned model to estimate fine misalignment, and executes the insertion under impedance control. |
|
Website adapted from here. |